CanSat
A high-school engineering project where we built a miniature satellite inside a soda can-from electronics and sensors to the flight computer, and recovery system. Our four-person team developed all software and hardware ourselves, gaining early hands-on experience with full end-to-end engineering.
- Side Project
- Java
- Python
- PyTorch
- Raspberry Pi
I Believe I Can Land#
My First Engineering Project (CanSat 2019)#
In 2019, just as I entered high school, I joined a small team that decided to take on the CanSat competition-an international challenge where students design, build, and launch a miniature “satellite” the size of a soda can. Even though CanSats don’t go to space, they’re deployed from ~1 km altitude and must perform real scientific and engineering missions: gather measurements, transmit telemetry, survive landing, and accomplish a self-designed secondary mission.
This became one of my earliest-and most defining-technical projects. It combined software, electronics, mechanics, physics, and a huge amount of trial and error. Our team called the project “I Believe I Can Land.”
Team & Roles#
We were a small group of four students, supervised by our IT teacher.
Although we initially divided responsibilities into clear roles, in practice everyone ended up doing everything-coding, testing, wiring, designing, and fixing whatever broke (which was often). It was true hands-on teamwork.
-
Lead Software Engineer - Krzysztof Zbudniewek
Built the full software stack: firmware, Raspberry Pi software, and the ground station. -
Lead Electrical Engineer - Bartłomiej Jacak
Designed the electrical system, wiring, and the integration of all modules inside the tiny CanSat cylinder. -
Lead Recovery System Engineer - Bartłomiej Krawczyk (me)
Responsible for modeling, testing, and designing the parachute system, including attempts at a guided parafoil. -
Software Engineer - Mateusz Kwiatkowski
Involved in developing firmware for the payload. -
Team Supervisor - Anna Stopińska
Oversaw the project and helped us navigate the competition requirements.
We were a small team-but motivated, curious, and very inexperienced. This project became our crash course in real engineering.

Mission Objectives#
Every CanSat must complete a primary mission and a self-designed secondary mission. Our secondary mission was ambitious-far more ambitious than we realized at the time.
1. Primary Mission: Telemetry & Environment Data#
The CanSat needed to measure:
- temperature (DS18B20 sensor)
- static pressure (BMP280 sensor)
- flight altitude
- frame number / timestamps
Data had to be sent live to the ground station via an ATSAMD21G18-based microcontroller and stored on an SD card for post-flight analysis.
2. Secondary Mission: Real-Time Landing Site Classification#
Our bold plan was to classify terrain beneath the CanSat during descent to detect areas that were:
- safe (fields, grass, open terrain)
- unsafe (water, buildings, roads, forests)
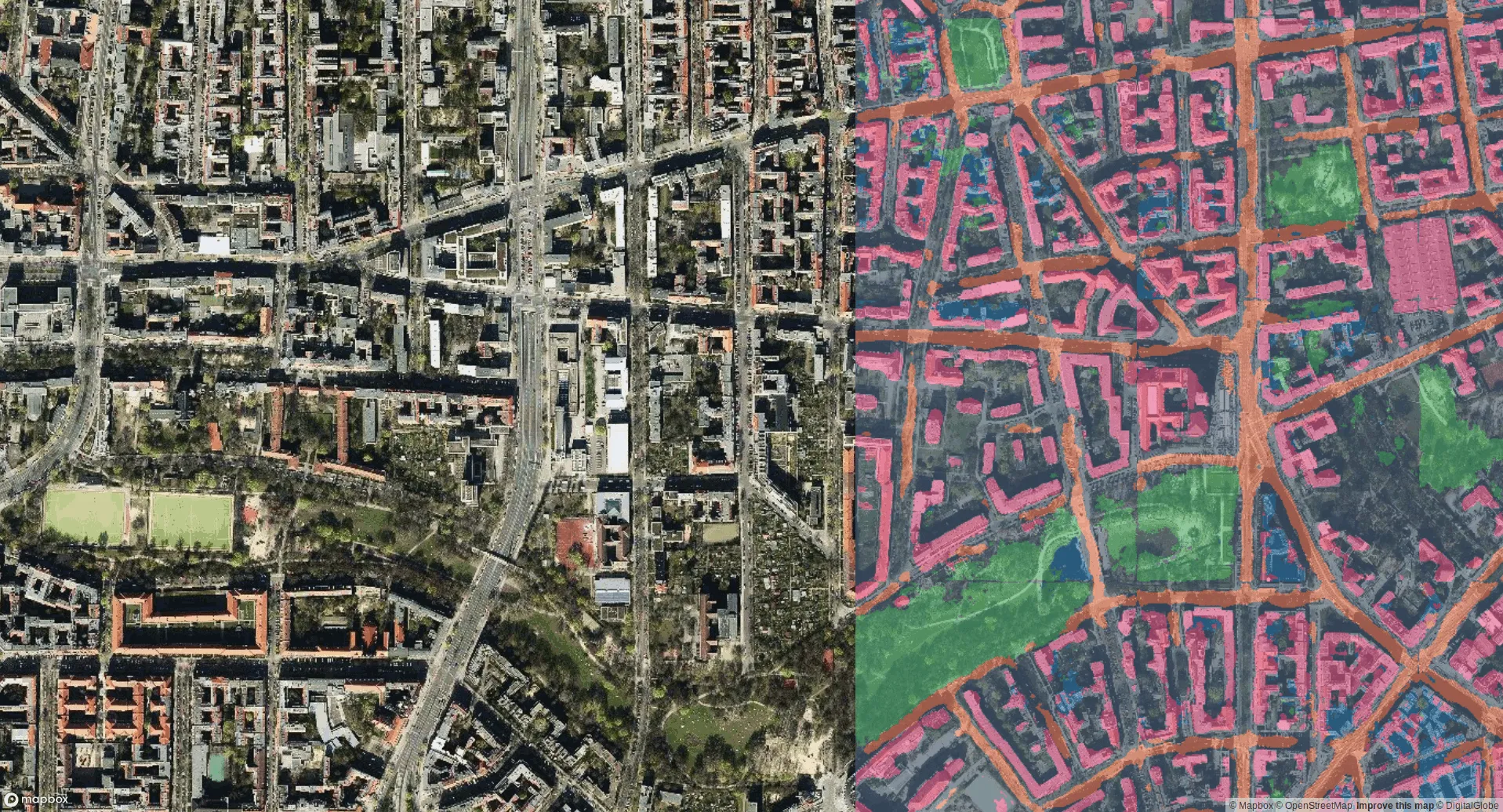
We used:
- a Raspberry Pi Zero
- Pi Camera
- a convolutional neural network (CNN) built in PyTorch
The idea was to:
- Capture live images during descent
- Filter out blurry or tilted images using IMU data
- Correct the perspective
- Run them through a neural network
- Build a heat map of suitable landing areas
It was an early exposure to computer vision and embedded ML-long before “edge AI” became mainstream.
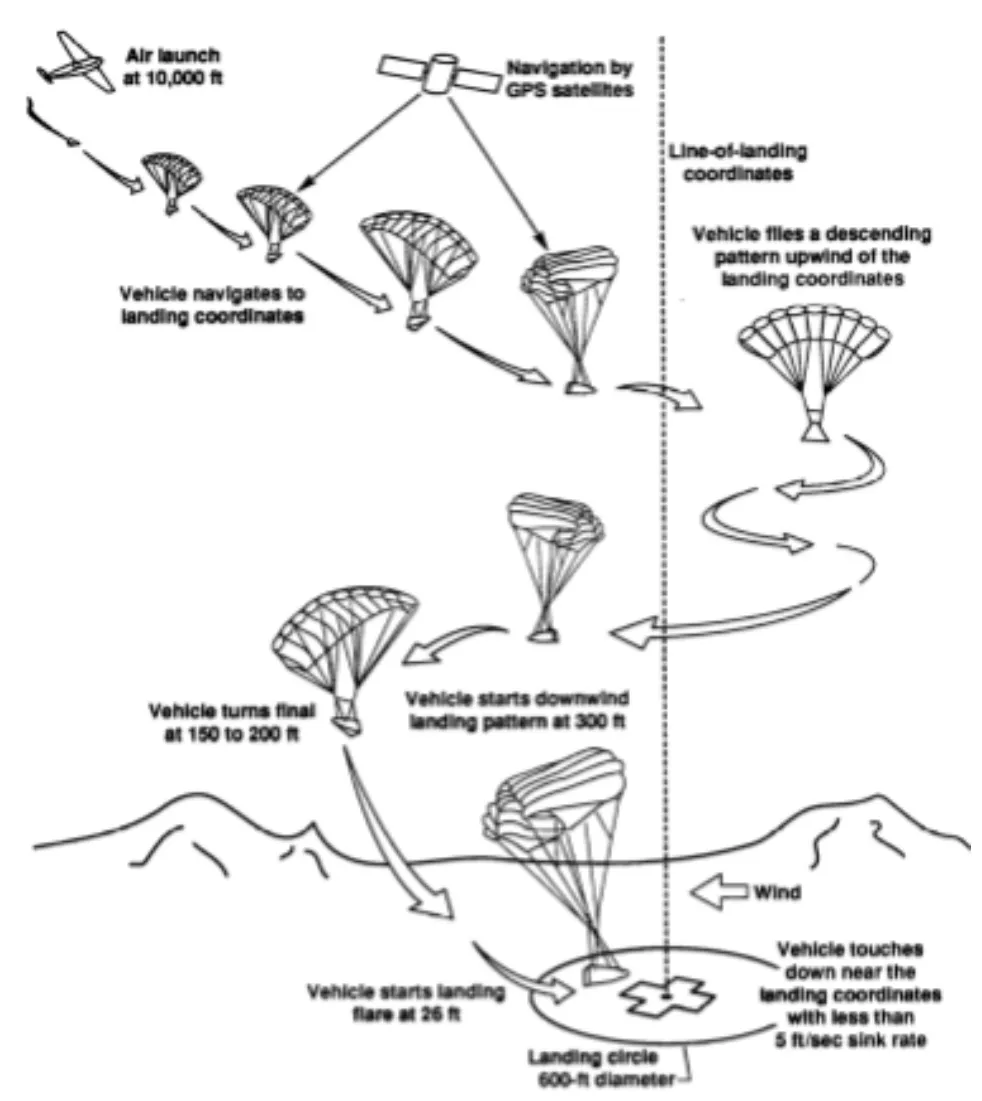
3. Attempted Tertiary Mission: Guided Landing#
Initially, we even wanted to steer the payload toward the best landing site using a parafoil parachute controlled by servos. This required:
- modeling lift-to-drag ratio
- calculating stable glide paths
- designing multi-line parafoil control
- simulating wind influence
While the idea was scientifically solid, reality reminded us that engineering is hard. After multiple failed prototypes (and many tangled parachutes), we ultimately dropped the guided-landing functionality and switched to a reliable round parachute.
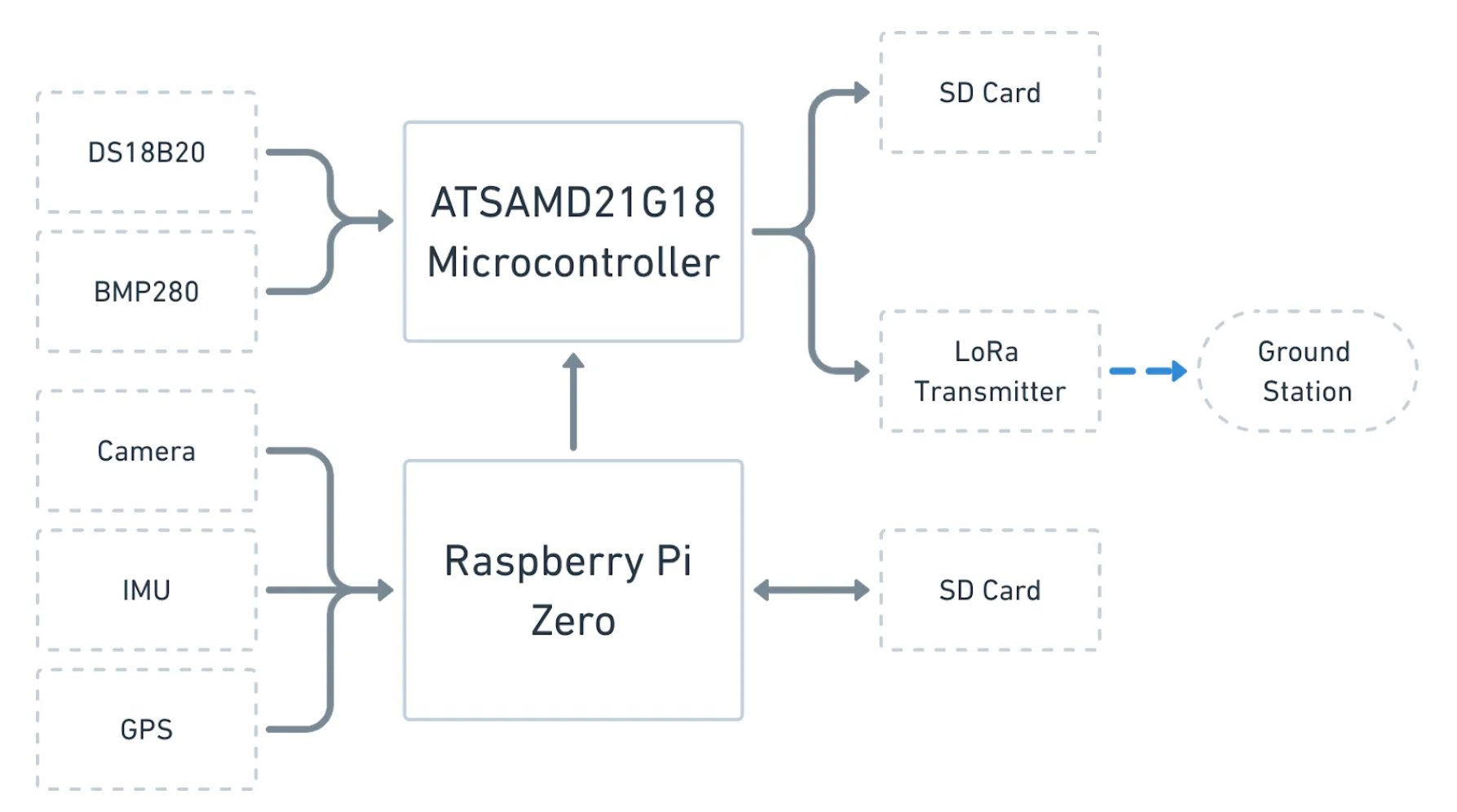
System Architecture#
Our CanSat was effectively a two-computer system:
Microcontroller (ATSAMD21G18)#
- Reads temperature & pressure
- Sends telemetry every second via LoRa
- Stores data on microSD
- Runs the entire primary mission independently
Raspberry Pi Zero#
- Captures images
- Processes IMU + GPS data
- Runs terrain classification (CNN)
- Generates landing heat maps
- Coordinates all secondary mission logic
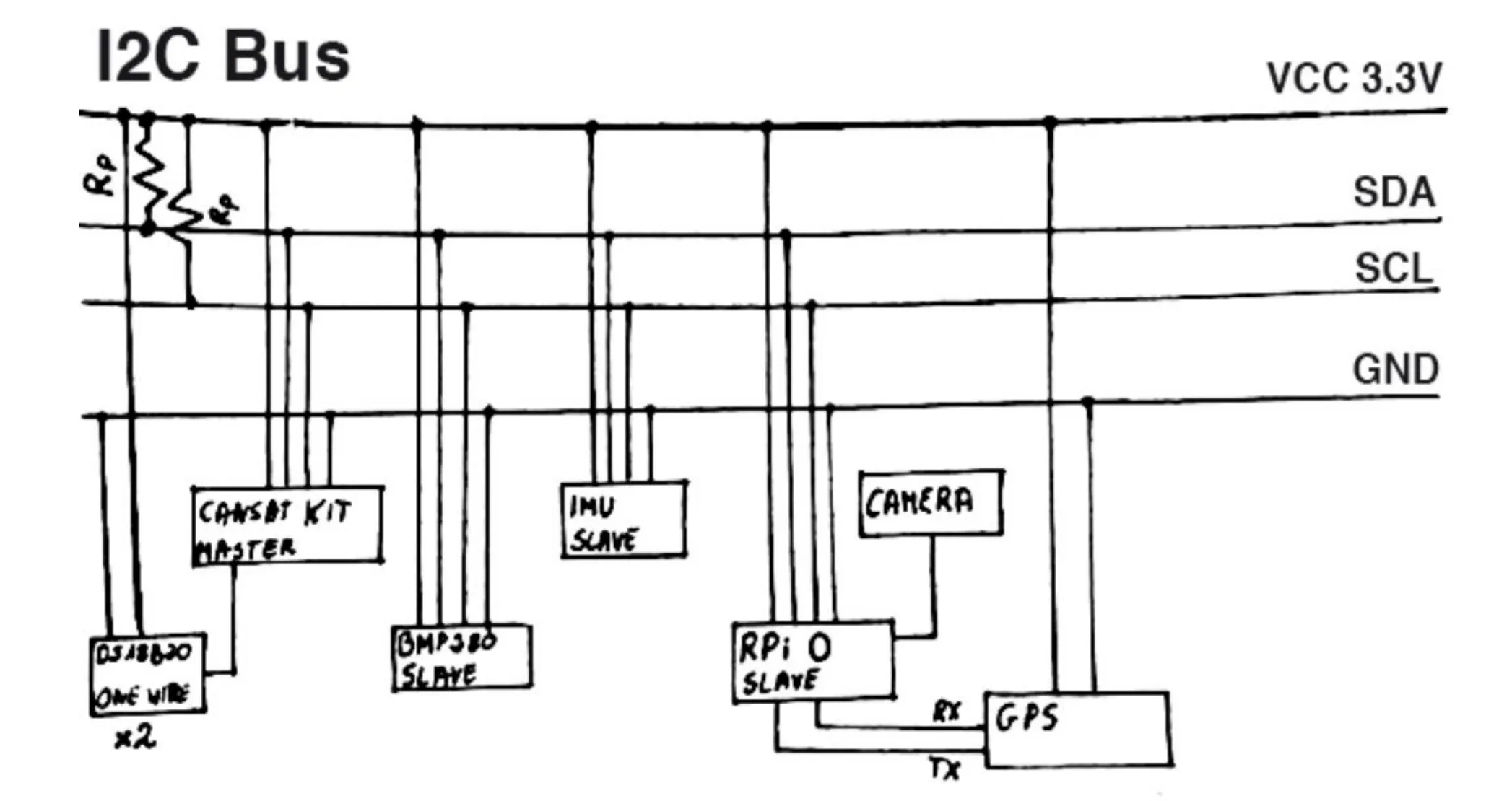
The Pi communicated with its peripherals using:
- I²C for sensors
- UART for GPS
- Camera ribbon for PiCam
- SPI / SDIO for storage
Despite the tiny form factor, it was a surprisingly complete embedded system.
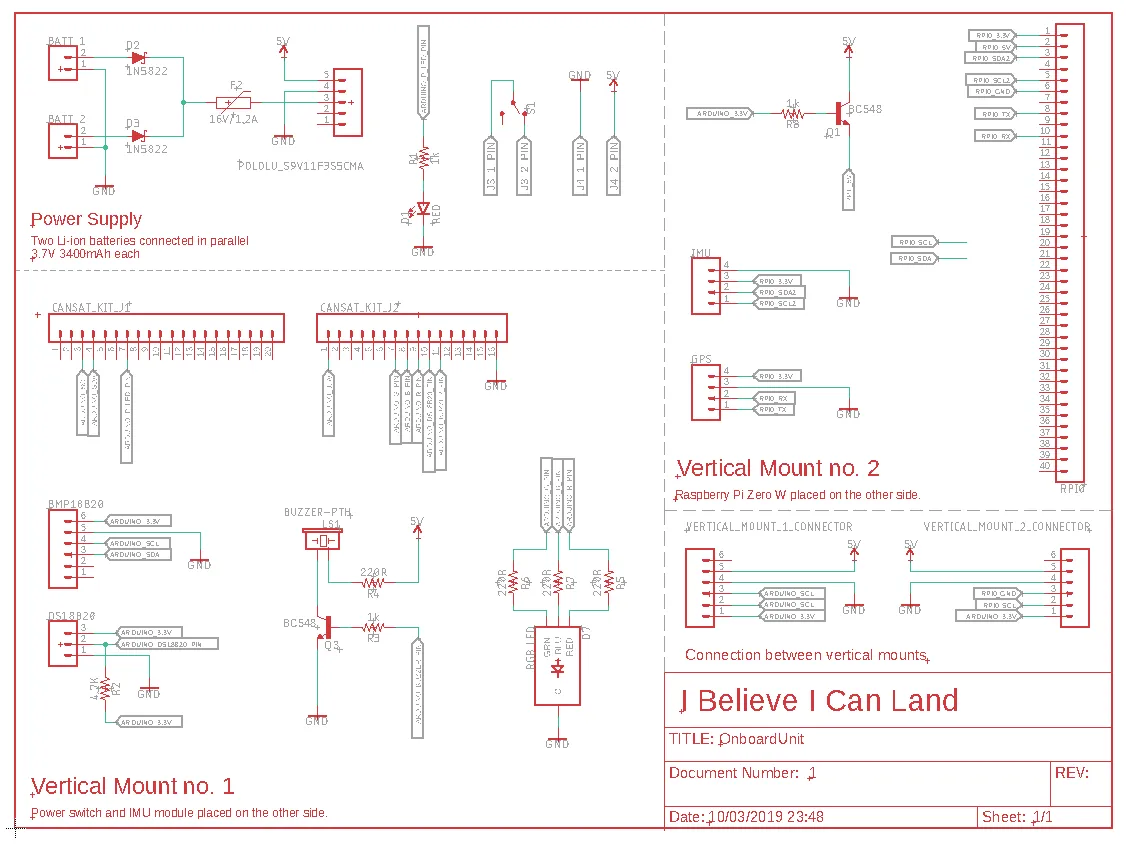
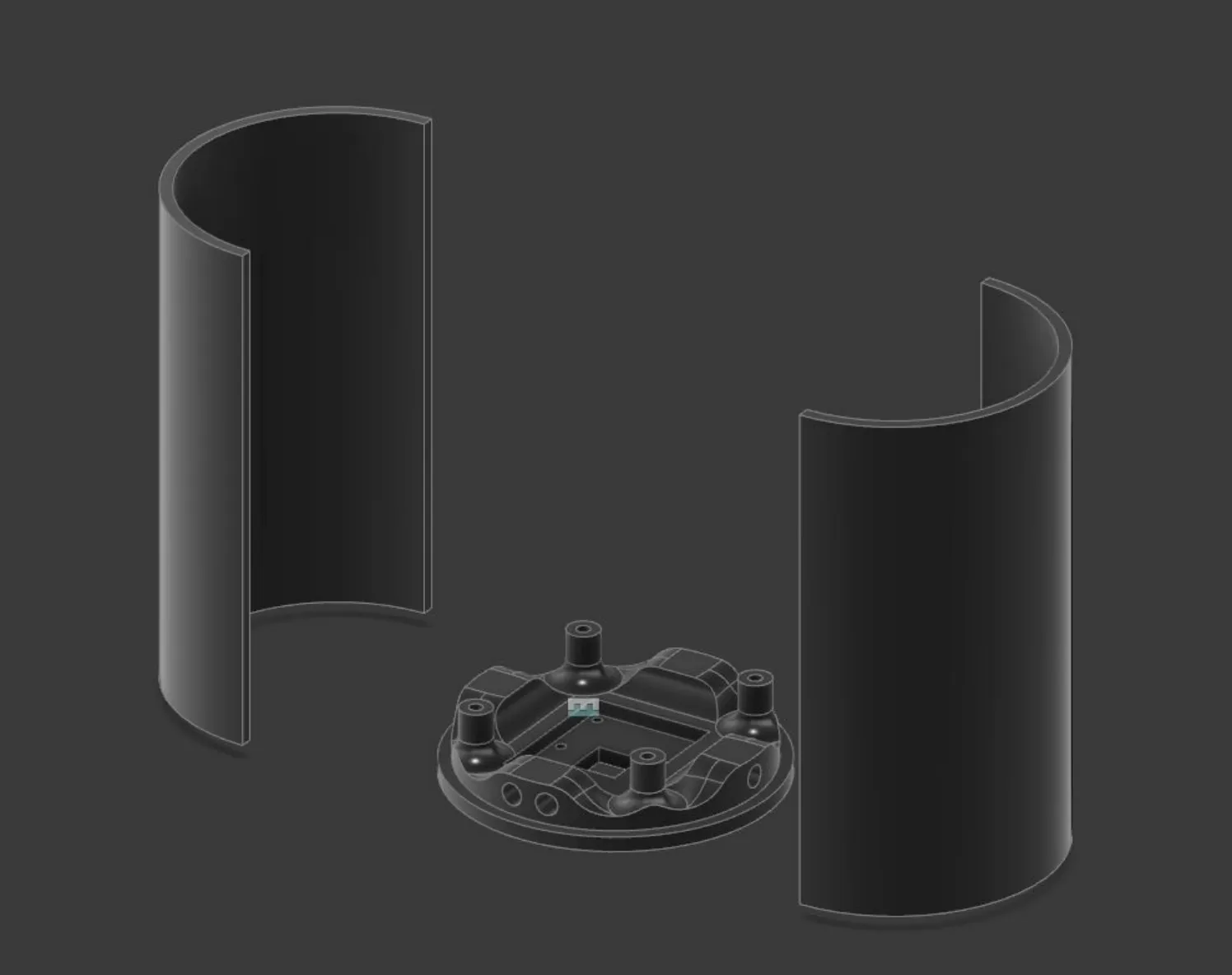
Mechanical Design#
Fitting a Raspberry Pi, camera, parachute mount, servos, and a full power system into a soda-can-sized shell was a miniature engineering challenge.
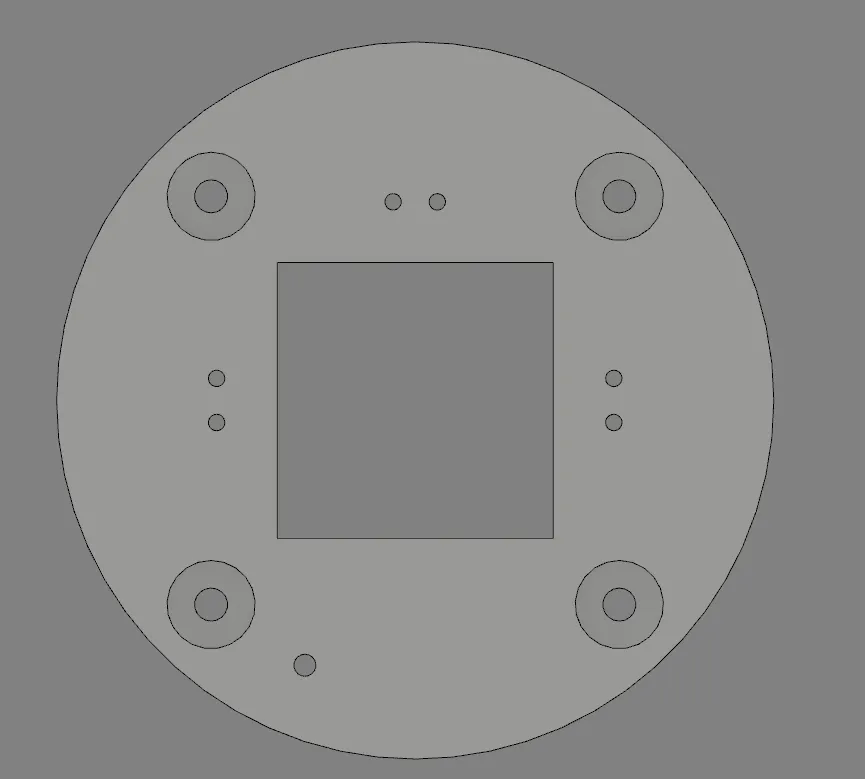
CanSat Case#
Designed in Autodesk Fusion 360, our case used:
- top and bottom plates
- 4 vertical guiding rods
- 6 external mounting holes
- 3D-printed internal supports
This modular design allowed fast inspections and repairs-something we quickly learned was essential.
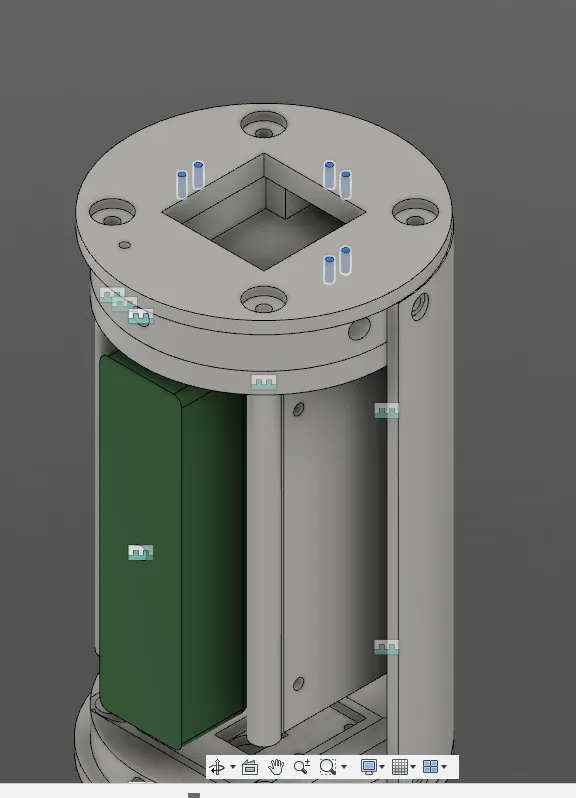
Vertical Mount for Raspberry Pi#
We created a dedicated 3D-printed vertical frame to hold the Pi Zero and extension boards. Given the tiny footprint and strict volume limits, this was the only feasible orientation.
Recovery System Engineering#
This was my part of the project-and the steepest learning curve.
Prototype 1: Parafoil (Clark-Y Profile)#
Our first goal was to build a controllable parafoil with:
- non-zero lift-to-drag ratio
- left/right steering via servos
- predictable glide performance
We built it from nylon fabric with household strings as suspension lines. It deployed-but didn’t glide. It simply descended like a normal parachute.
We realized we had incorrectly adapted round-parachute formulas to a parafoil, which behaves completely differently aerodynamically.
Prototype 2: Parafoil (Based on Academic Research)#
We rebuilt everything using aerodynamic equations from:
- Om Prakash, Aerodynamics, Longitudinal Stability and Glide Performance of Parafoil/Payload System

This time we:
- adjusted aspect ratio
- optimized chord length & canopy span
- changed line thickness to 0.2 mm
- recalculated lift/drag forces

The updated parachute flew much better-but had problems:
- too large for the CanSat container
- inconsistent openings
- frequent line tangling
- delayed inflation
Ultimately, we determined the design wasn’t reliable enough for the competition constraints.
Final Design: Round Parachute#
Based on NASA and CanSat training materials, we switched to a round parachute-simple, reliable, predictable.
And most importantly: it fit inside the can.

Testing the System#
We tested each subsystem separately before integrating:
Primary Mission Tests#
We verified telemetry accuracy by reading:
- frame number
- pressure
- temperature
Comparing DS18B20 and BMP280 validated sensor accuracy.
Secondary Mission Tests#
Testing the parafoil prototypes took weeks:
- balcony drops
- school-building drops
- indoor glide tests
- multiple redesigns
While the neural network prototypes worked in simulation, real airborne testing was limited by our parachute delays.
Project Timeline & Iterations#
Between November 2018 and March 2019, we built:
- 4 main hardware prototypes
- 3 parachute generations
- 2 software stacks
- dozens of drop tests
- a full outreach program (blog, shirts, presentations)
It was more than a school project-it was a full engineering cycle.
Budget & Sponsors#
Total budget: ~500 PLN (~116 EUR) Most parts were sponsored by:
- TPU Sp. z o.o.
- BOTLAND (discounts and support)
Outreach & Public Engagement#
We documented the project with:
- a Facebook page
- technical blog posts
- school presentations
- visual branding & logo design
- even an article in local newspaper
It was a great introduction to communicating engineering work publicly.
Conclusion: What I Learned#
This project taught me more than any class at the time:
- how to work in a team
- how to design, test, and iterate hardware
- how to integrate software with real sensors
- how to model aerodynamic systems
- how to manage complexity under tight constraints
- how to fail, recover, and move forward
“I Believe I Can Land” was my first real multidisciplinary engineering experience. It sparked my interest in embedded systems, physics-based modeling, and designing things that interact with the real world-a theme that continues in my later projects.